제어에 관한 기본적인 다이어그램이다. 제어에서 필요한 것은 나온 결과를 다시 일정한 양만큼 입력으로 넣는 것이다. 이를테면 자동차의 제어를 위해서 출력(속도)를 측정하고, 그것을 다시 제어를 위한 입력으로 하는 것이다.
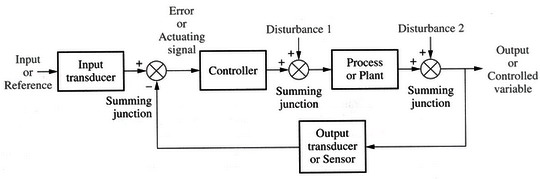
물론 위 그림에서 보듯이 입력과 그에 따른 수학적, 정량적 계산결과만이 있는 것이 아니라 외부 노이즈가 존재한다. 이를테면 동일한 가솔린을 사용하더라도 바람이 뒤에서 부는지 앞에서 부는지에 따라 차의 속도는 달라지는 것 따위다. 다양한 종류의 노이즈를 완벽히 계산할 수 없기 때문에 그것은 그냥 들어오는 것으로 처리한다. 결과값, 즉 RPM 을 측정하여 그것을 다시 입력으로 처리하는 것이다.
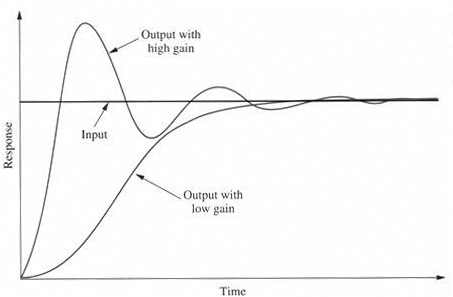
위 [Controller] 박스의 Gain 을 어떻게 처리하느냐에 따라서 위와 같은 결과 곡선이 만들어진다. Gain 을 크게 잡으로 반응은 매우 빠르게 나타난다. 즉시 결과값에 가까운 값으로 가고, 넘어가고, 다시 줄어드는 식으로 일정한 값을 찾아가게 된다. 반면 Gain 값을 작게 잡으면 서서히 증가하여 최종값이 수렴하는 식의 그래프가 그려진다.
제어에서 Gain 을 어떻게 잡는지가 제어기의 성능을 결정한다. 최종결과치에 가능한 짧은 시간에 도달하게 하는 것이 좋은 제어기이기도 하다. 동시에 특정한 제어기의 경우 Overshoot 을 허용하지 않기도 한다. 이를테면 벽면에 붙어 있는 스위치를 켜고 끄는 로봇팔 같은 경우 Overshoot 이 일어난다는 것은 로봇팔의 망가뜨릴수 있는 치명적인 결점이 된다.
물론 위 그림에서 보듯이 입력과 그에 따른 수학적, 정량적 계산결과만이 있는 것이 아니라 외부 노이즈가 존재한다. 이를테면 동일한 가솔린을 사용하더라도 바람이 뒤에서 부는지 앞에서 부는지에 따라 차의 속도는 달라지는 것 따위다. 다양한 종류의 노이즈를 완벽히 계산할 수 없기 때문에 그것은 그냥 들어오는 것으로 처리한다. 결과값, 즉 RPM 을 측정하여 그것을 다시 입력으로 처리하는 것이다.
위 [Controller] 박스의 Gain 을 어떻게 처리하느냐에 따라서 위와 같은 결과 곡선이 만들어진다. Gain 을 크게 잡으로 반응은 매우 빠르게 나타난다. 즉시 결과값에 가까운 값으로 가고, 넘어가고, 다시 줄어드는 식으로 일정한 값을 찾아가게 된다. 반면 Gain 값을 작게 잡으면 서서히 증가하여 최종값이 수렴하는 식의 그래프가 그려진다.
제어에서 Gain 을 어떻게 잡는지가 제어기의 성능을 결정한다. 최종결과치에 가능한 짧은 시간에 도달하게 하는 것이 좋은 제어기이기도 하다. 동시에 특정한 제어기의 경우 Overshoot 을 허용하지 않기도 한다. 이를테면 벽면에 붙어 있는 스위치를 켜고 끄는 로봇팔 같은 경우 Overshoot 이 일어난다는 것은 로봇팔의 망가뜨릴수 있는 치명적인 결점이 된다.

